机器人原生世界动作模型问世!首创时空一体架构,复旦系团队出品
来源:互联网 更新时间:2026-05-31 19:44
通用人工智能的战火,已经彻底从虚拟的数字空间,一路烧到了真实的物理世界。
毫无疑问,
具身智能、机器人大脑
当前行业主流的VLA视觉语言动作模型、通用世界模型、视频推演方案,普遍存在一个尴尬的现实:空间感知精度不够,物理逻辑约束经常掉线,长时序规划能力薄弱,真机落地更是鲁棒性堪忧。说白了,这些模型在虚拟环境里跑得挺溜,一到现实世界就容易“水土不服”,无法支撑机器人实现真正的自主感知、自主推理、自主决策与稳定交互。
在物理AI产业快速迭代的关键节点,深耕世界动作模型底层技术五年的
复旦系科创企业眸深智能
STI-WM时空一体世界动作模型(Spatiotemporally Integrated World Model)
作为
专为机器人原生打造的通用具身大脑
复旦+英特尔+英伟达,硬核学术成果稳居全球第一梯队
眸深智能的技术突破,绝非一日之功,背后是长期深耕的学术积淀与全栈工程能力。
公司核心团队源自复旦大学深度学习实验室,一个典型的
学术科研、工程落地、产业商业化
陈涛
张益民
英伟达
穆泽林
团队
超九成
多年来的积累,让团队斩获多项
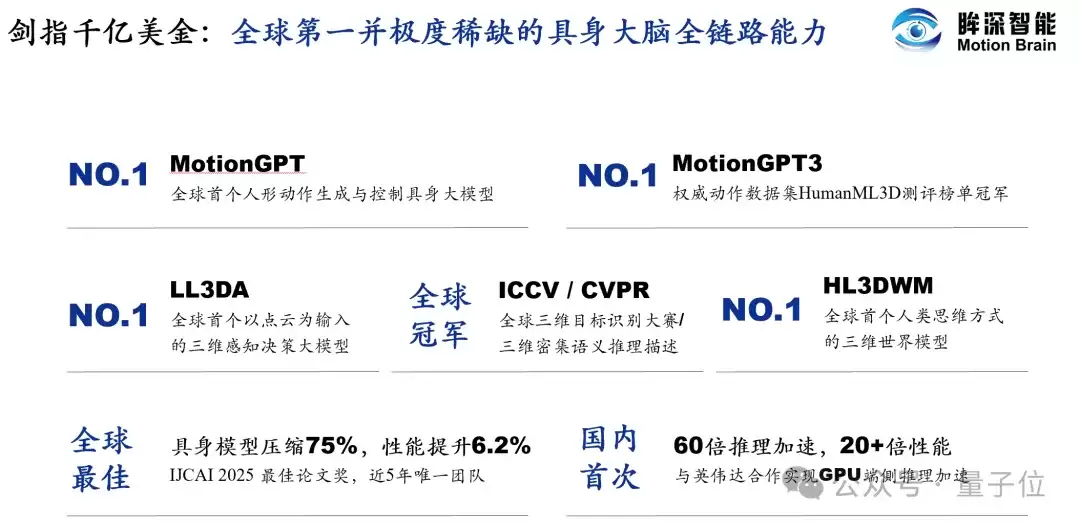
全球顶尖赛事冠军与顶级学术荣誉
- 推出全球首个人形动作生成大模型MotionGPT、三维世界模型HL3DWM;
- 拿下ICCV2023全球三维目标识别冠军、CVPR2024三维密集语义推理冠军;
- 斩获IJCAI2025杰出论文奖,是;
近五年国内唯一斩获该奖项的具身智能团队
- 团队技术负责人还入选了2025年中国具身智能新秀EAI榜单20强。
其原创技术成果被英伟达DAIR等国际顶尖实验室引用,学术创新与工程落地能力稳居全球第一梯队。
重构行业技术范式:5年沉淀,开创并引领世界动作模型路线
当前行业多数方案仍采用
通用世界模型+VLA拼接
眸深智能的思考方式不同。他们从AGI本质出发,率先确立了
世界动作模型原生融合路线
早在2022年,团队便创新性地提出了
全球首个影空间语言-动作端到端映射MLD模型
历经五年迭代,团队已完成
7代动作模型技术更新
机器人原生架构四维统一,破解真机落地核心痛点
不同于行业依托大语言模型二次改造的适配性方案,
STI-WM时空一体世界动作模型
空间结构、时间演化、物理一致性、执行鲁棒性
模型可以兼容RGB图像、深度点云、机器人本体多模态感知输入,将复杂环境信息统一编码为紧凑高效的时空潜在世界状态。上层可以支撑百秒级长时程任务推演与全局轨迹规划,下层则输出精准可控的精细化动作片段。同时依托实时环境观测进行动态纠偏、在线重规划,构建出了一个完整的“理解世界—推演未来—规划动作—执行纠错”的物理智能闭环。
相较于Dreamer系列偏重环境预测、忽视真机控制的通用世界模型,LWM、PWM等时空割裂的抽象动作模型,以及仅追求视觉逼真、无视物理可行性的视频生成模型,STI‑WM跳出了纯视觉推演的误区。它把三维几何约束、动力学校验、真机闭环执行作为核心,彻底解决了传统模型信息失真、泛化薄弱、落地困难的核心痛点,让机器人真正做到
看懂三维空间、遵守物理规则、自主规划任务、稳定闭环执行
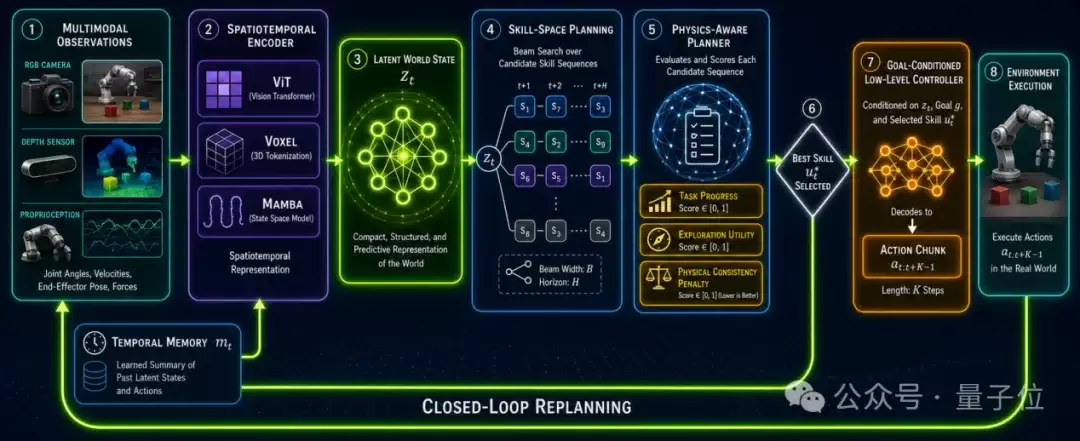 △眸深STI-WM1.0时空一体世界动作模型架构
△眸深STI-WM1.0时空一体世界动作模型架构六大核心技术壁垒,支撑机器人规模化落地
依托五年全链路自研积淀,STI‑WM构建起行业难以复刻的六大技术优势:
- :空间结构与时间动态实时耦合,消除多模块拼接的信息损耗,大幅提升推理效率与决策精准度;
时空一体化原生建模
- :基于点云直接还原真实物理空间,彻底规避2D视觉深度缺失、空间误判的固有缺陷;
原生三维感知能力
- :融合碰撞检测、动力学约束,从底层杜绝不合理动作与环境崩坏,保障真机执行安全稳定;
内置物理一致性引擎
- :突破传统短片段动作局限,支持百秒级连续复杂任务自主推演,适配真实场景复杂作业需求;
长时程高阶规划
- :自研模型压缩、量化蒸馏技术,实现百亿级大模型低成本落地机器人端侧芯片,大幅降低产业化算力门槛;
端侧轻量化部署
- :依托虚拟世界大规模预训练+少量真机微调,高效适配陌生场景与长尾任务,大幅降低数据依赖。
小样本强泛化能力
资本与商业双爆发,产业化进程突飞猛进
凭借底层架构原创创新、全栈自研技术壁垒、以及可落地的商业化能力,眸深智能迎来了高速发展期。一个关键数据:
半年内完成5轮融资,3亿元Pre-A轮融资获5倍超额认购
商业化落地同步驶入快车道。公司已与宇树科技、禾川科技、颐家养老等行业头部企业达成深度合作,技术落地覆盖工业制造、居家康养、商业服务等多元真实场景。
目前,眸深智能已与近十家上市公司达成战略合作,其中包含
五家以上千亿级产业龙头
 △眸深智能与居家养老头部企业颐家战略合作
△眸深智能与居家养老头部企业颐家战略合作当下,AGI竞争正式进入
物理智能新时代
未来,眸深智能将持续迭代STI‑WM模型体系,全面赋能人形机器人、四足机器人、工业机械臂、服务机器人等全品类硬件,加速通用具身智能的规模化落地,推动中国原生物理AI技术领跑全球,开启物理世界AGI的全新纪元。
-
《Off Campus》第二季官宣:这对CP还在,但不再是主角
-
和平精英如何做到压枪稳-和平精英怎样才能压枪稳
-
客单价碾压宝马奥迪!极氪5月交付新车34377辆:连续4个月双增长
-
免费影视剧APP推荐
-
HBO 奇幻剧《龙之家族》第三季定档 6 月 22 日,最终预告片曝光喉道海战
-
儿子穿新中式现身大会堂 马斯克罕见用中文回应:他正在学习普通话
-
DOTA2 TI时隔七年重返上海!门票6月10日开抢,国服享受优先购买!
-
抖音最火沙雕男生网名(精选100个)
-
网络热词聊污是什么意思
-
帅气继父网名女生可爱英文(精选100个)
-
金铲铲之战s17六暗星卡莎阵容玩法构筑指南
-
我的末日校园海斗手游上线时间是哪天
-
蒙古上单是什么梗
-
SpaceX狂揽AI人才,马斯克亲自面试且不看简历背景
-
阿里发布Qwen3.7-Max大模型,全球第五、国产第一
-
免费看电影的软件推荐
-
韦一敏是什么梗
-
晨字沙雕网名大全女生(精选100个)
-
帅到极致的网名女生霸气(精选100个)
-
短剧《情绪超市》剧情介绍
-
1 商汤善惠烧卖购机器人小店上海“开业”,让机器人真正落地线下零售 06-08
-
2 魔导瑞兹阵容如何搭配 06-08
-
3 赵同阳:从大专“学渣”到机器人“T-800之父” 06-09
-
4 “超级明星创企”昆仑行机器人,正式浮出水面 06-09
-
5 首次,纯人类视频预训练VLA灵巧操作,少量数据微调就能部署成功 06-09
-
6 Chat已死,GPT史上最大改版,不只聊天 06-09
-
7 2026,卖数据比卖机器人先赚钱 06-09
-
8 6天预售2110台,情感陪伴机器人卖给了谁? 06-10
-
9 扣子飞书机器人集成与协同办公实战指南 06-10
-
10 steampy代购怎么操作 steampy代购方法 06-10



