五分钟读懂具身智能:五大技术壁垒与突破方向
来源:互联网 更新时间:2026-06-06 13:43
当前,具身智能技术正以前所未有的速度迭代演进,研究热点频出,应用场景不断拓展,产业界与学术界呈现出蓬勃发展的态势。随着多模态大模型、高精度仿真器、轻量化硬件等技术的持续突破,2026年已被广泛视为具身智能从实验室走向行业落地的“元年”。
然而,这一轮技术热潮背后,仍有多个核心难题亟待攻克——数据匮乏、泛化能力不足、软硬件融合困难、感知控制难题、以及可解释性欠缺,正是当前制约具身智能大规模落地的五大关键瓶颈。
数据壁垒:为何我们“不缺数据”,却“缺可用数据”
很多人都会问一个问题:互联网上每天产生的文字、图片和视频数以亿计,为什么具身智能还会面临数据短缺的困境?问题的关键,在于数据类型上的根本错配。互联网积累的文本、图像、视频等数据,主要是面向人机交互与信息传播场景构建的,其模态、采样率、标注方式与物理世界的实时交互需求存在本质差异。
具身智能真正需要的数据,是在真实物理环境中交互产生的多模态数据——不仅包含视觉图像,还涵盖关节角度、动作轨迹、物体状态的变化、环境物理参数等一系列时空维度上的连续信息。这类数据对时序对齐、帧率一致性、空间坐标同步有极为严格的要求。从采集成本来看,获取一小时高质量的物理交互数据,其成本往往是一般数据标注的十倍以上。目前,训练一个具备通用能力的具身模型,至少需要千万小时级的真实物理交互数据,而全行业积累至今的总量尚不足百万小时,数据缺口高达一到两个数量级。
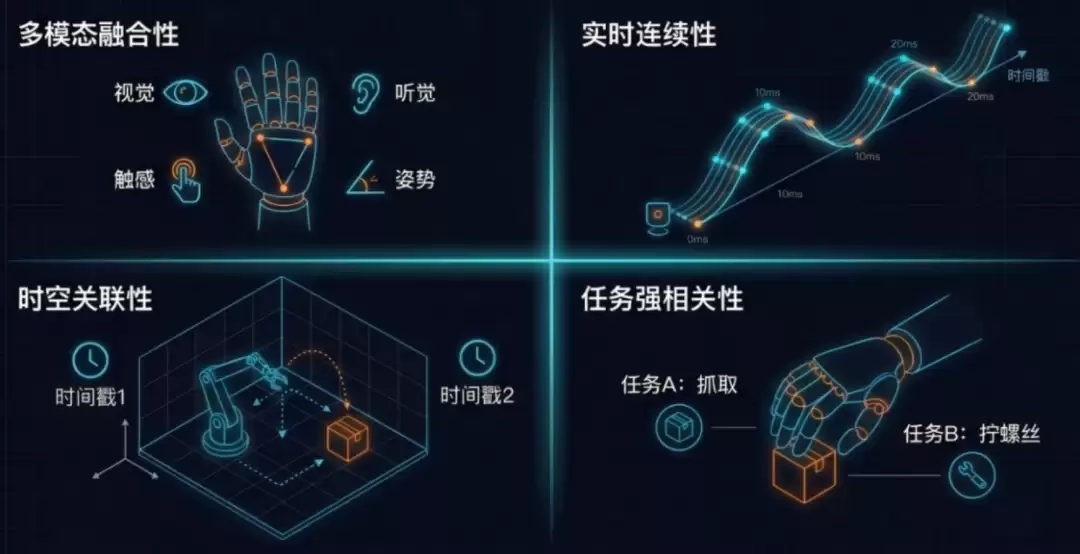
具身数据四大核心特征
面对这一挑战,产业界与学术界正在积极布局:京东自建了全国首个具身智能数据采集社区,从源头解决数据匮乏问题;湖北人形机器人创新中心与极佳视界联合共建了全球首个世界模型数据工厂,探索规模化、高质量数据生产的可行路径。这类探索,正在为具身智能的底层发展铺平道路。
物理泛化:“记住”场景远不等于“理解”物理规律
物理泛化能力,简单来说,是指在无限变化的物理环境中,将已学会的技能迁移到新场景、新物体、新条件下的能力。人类在这方面的表现堪称完美——无论是客厅、厨房还是办公室,无论杯子形状、材质、颜色如何变化,我们都能从容而稳健地完成拿起杯子的动作。然而,当前的具身智能机器人远未达到这一水平。
一个在特定训练场景下能流畅完成任务的机器人,一旦光照条件改变、物体材质替换,甚至仅仅视角发生偏移,就可能在简单的抓取动作上频频失败。究其原因,目前绝大多数具身智能系统依赖于仿真训练加真机微调的范式——机器人记住的是具体场景下的动作模板,而非底层的物理规律。它们并没有真正理解重力、摩擦、刚性等物理概念,只是在特定条件下“复现”了先前习得的运动模式。
更令人担忧的是,当前的仿真环境与真实物理世界之间仍存在显著差异。无论是物体表面的摩擦力系数、空气阻力、还是环境的动态变化,仿真都难以完全复现真实世界的复杂性与连续性。这意味着,在仿真器中表现优异的机器人,一旦投入真实物理环境中,其性能可能大打折扣。
软硬件融合:智能算法与物理执行之间的鸿沟
具身智能的本质特征在于“智能与身体的统一”——这决定了它必须走软硬件一体化的发展路径。然而,当前的硬件执行能力远远滞后于AI模型的智能水平。尽管机器人的结构强度已经超越人类,但在关节执行器、驱动器的爆发力、灵活性及能效比方面,与人体的肌肉系统仍存在巨大差距。面对家庭、工厂、户外等复杂物理环境,现有的硬件性能尚难以支撑灵活、稳健的物理交互。
与此同时,运动控制对实时性的严苛要求进一步加剧了软硬件融合的难度。机器人在执行精细化操作或规避突发障碍时,需要毫秒级的极速推理与反馈。然而,设备上搭载的边缘芯片算力体量有限,难以承载大尺寸智能模型的实时运行。复杂动作规划与环境判断一旦产生计算延迟,就会导致机器人动作卡顿甚至失控。
将运算任务上传云端处理,则面临网络数据传输的固定延迟问题。在实际应用中,几十毫秒的延迟就可能导致机器人无法及时响应突发状况,大幅降低运动的稳定性与安全性。软硬件之间的这种“节奏错配”,已成为制约具身智能走向复杂环境的核心瓶颈之一。
多模态感知与动态控制:在灵活性与稳定性之间艰难平衡
现实世界是高度动态且非结构化的——家庭环境中散落的杂物、车间里移动的工人与设备、户外复杂多变的路况,都会对机器人的感知与控制系统构成持续扰动。当前,机器人的多模态感知技术仍处于浅层融合阶段,视觉、触觉、听觉、本体感知等不同模态之间的时空对齐尚未有效实现。具体表现为:不同传感器的采样频率不同步、特征表达方式不统一、模态间信息冗余且难以融合。
在感知层面临多重干扰的情况下,控制系统需要在保障稳定性的同时兼顾灵活性与鲁棒性。然而,现阶段的主流控制算法很难在这两者之间取得理想平衡:要么执行动作僵硬、适应能力差,难以应对环境的动态变化;要么在尝试精细化操作时容易失去控制,导致不稳定甚至危险。
这一问题在家庭服务、医疗康复等对安全性有严格要求的场景中尤为突出。如何在复杂动态环境中实现稳定、灵活、安全的物理交互,将是具身智能领域亟需突破的关键技术方向之一。
决策黑箱:看不见的“思维”如何保障安全
或许听起来难以置信,但目前大多数具身智能系统仍然遵循“黑箱决策”的逻辑。机器人执行每一个动作、做出每一次决策的背后逻辑,对于开发者和使用者来说都是不透明的。当机器人出现判断失误或动作失控时,外界无法准确理解其错误的成因——是因为传感器噪声、模型幻觉、控制策略偏差,还是环境干扰所致?这种不透明性直接导致了两个后果:问题难以精准定位,优化迭代效率低下。
决策黑箱的问题并非学术上的“锦上添花”,而是关乎应用落地的现实障碍。在家庭陪伴、医疗护理、工业协作等需要高度安全性与可解释性的场景中,黑箱决策的不确定性意味着潜在的安全风险——用户无法预判机器人在特定情境下会做出何种行为,更无法在错误发生后从根源上加以修正。
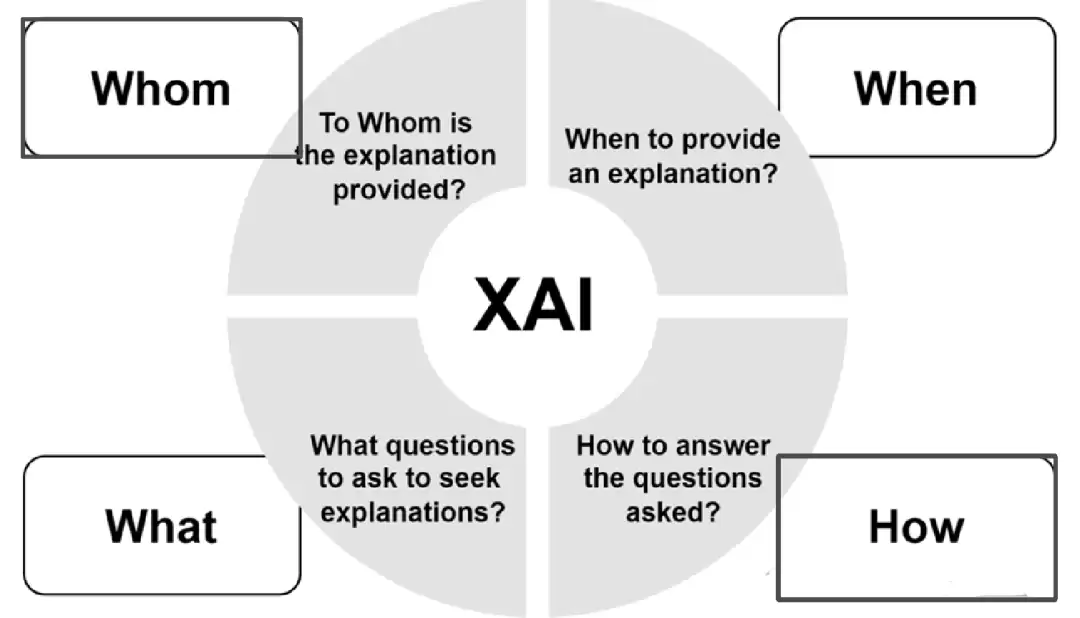
值得欣慰的是,这一领域的突破正在逐步推进。可解释人工智能(XAI)方法在具身智能领域的应用探索已经展开,通过引入因果推断、模型可解释性评估、行为日志分析等手段,研究者正在努力打开“黑箱”,让机器人的决策过程变得可追溯、可理解、可优化。
前景展望:难题已有局部突破,未来可期
尽管五大技术难题各有不同的成因与表现,但它们并非不可逾越。近年来,全球范围内的研究团队正从数据采集、仿真训练、轻量化模型、边缘计算、可解释AI等多个方向同步推进,部分难题已经获得了局部性、阶段性的突破。例如,数据工厂的建设显著降低了高质量物理交互数据的获取成本;世界模型和基础模型的发展让机器人的泛化能力有所提升;边缘AI芯片的性能持续升级,为复杂模型的实时运行提供了更强大的硬件基础。
在可预见的未来,随着数据积累、算法演进与硬件迭代的协同发力,具身智能的技术瓶颈将不断被突破。
-
《Off Campus》第二季官宣:这对CP还在,但不再是主角
-
和平精英如何做到压枪稳-和平精英怎样才能压枪稳
-
客单价碾压宝马奥迪!极氪5月交付新车34377辆:连续4个月双增长
-
免费影视剧APP推荐
-
儿子穿新中式现身大会堂 马斯克罕见用中文回应:他正在学习普通话
-
HBO 奇幻剧《龙之家族》第三季定档 6 月 22 日,最终预告片曝光喉道海战
-
DOTA2 TI时隔七年重返上海!门票6月10日开抢,国服享受优先购买!
-
抖音最火沙雕男生网名(精选100个)
-
网络热词聊污是什么意思
-
帅气继父网名女生可爱英文(精选100个)
-
金铲铲之战s17六暗星卡莎阵容玩法构筑指南
-
我的末日校园海斗手游上线时间是哪天
-
阿里发布Qwen3.7-Max大模型,全球第五、国产第一
-
SpaceX狂揽AI人才,马斯克亲自面试且不看简历背景
-
免费看电影的软件推荐
-
晨字沙雕网名大全女生(精选100个)
-
蒙古上单是什么梗
-
帅到极致的网名女生霸气(精选100个)
-
短剧《情绪超市》剧情介绍
-
免费看片软件下载地址推荐
-
1 英伟达发力具身智能,将在新加坡打造AI研发新地标 05-29
-
2 亚洲首店,宇树科技具身智能体验馆 5 月 31 日在上海开业 05-29
-
3 宇树具身智能体验馆亚洲首店将于5月31日在上海开业 05-30
-
5 为了还原具身智能科研市场的全貌,我们找了多个头部高校聊聊 05-31
-
6 机器人先挣钱,还是先追求AGI?具身智能路线之争摆上台面 06-02
-
8 投资人疯抢!千寻智能3个月狂揽近50亿:马云、雷军现身其中 06-04
-
9 具身智能背后的“隐形亚军”,要IPO了 06-05



