NVIDIA Isaac GR00T N1的特点和优势
来源:互联网 更新时间:2026-05-28 12:38
人形机器人的终极愿景,是让它们能无缝融入人类的工作与生活空间,接手那些重复、枯燥甚至高强度的任务。但理想很丰满,现实却很骨感。要为真实世界千变万化的任务和充满不确定性的环境,打造一个通用的“机器人身体”,挑战重重。过去,工程师们往往需要为每一个新任务、新场景,从头训练一个专用的人工智能模型。这个过程不仅需要海量特定数据、耗费巨大的算力,模型的“举一反三”能力也相当有限,导致开发效率低下,成本高昂。
如今,这一困局迎来了破局的关键。NVIDIA推出的Isaac GR00T项目,正试图通过一套组合拳来加速通用人形机器人的开发进程。它提供开源的、高度仿真的SimReady数据、Isaac Sim等强大的仿真框架、合成数据蓝图,以及预训练好的基础模型,为开发者搭建了一条从虚拟训练到实体应用的快车道。
NVIDIA Isaac GR00T N1:首个开源人形机器人基础模型
在这个生态中,NVIDIA Isaac GR00T N1无疑是一颗耀眼的明星。它被业界认为是世界上首个面向通用人形机器人推理与技能的开源基础模型。这个模型的“通用”之处在于,它能理解语言、图像等多种模态的指令,并据此在不同的环境中执行具体的操作任务,实现了“一个模型,多种应用”的跨越。
GR00T N1的强大,源于其“见多识广”的训练历程。它的训练数据构成了一个庞大的金字塔:底层是来自互联网的海量人类视频数据,提供了关于物体交互和自然动作的广泛认知;中层是由NVIDIA Omniverse平台生成的合成数据,能以极低成本模拟无限场景;塔尖则是通过远程操作收集的真实机器人数据,精准反映了机器人的物理极限。如今,开发者已经可以通过Hugging Face上的NVIDIA物理AI数据集,免费获取其中的部分宝贵资源。
正是基于这样的数据训练,GR00T N1展现出了令人印象深刻的泛化能力。它使用同一套模型参数,就能驱动如Fourier GR-1、1X Neo等不同形态的人形机器人,完成从单臂或双臂抓取物体,到在双臂间传递物品等一系列操作。更关键的是,它还能理解并执行那些需要持续上下文判断和多步骤协作的复杂任务,比如物品的整理、包装与检查,这让它在物流、制造等实际场景中具备了巨大的应用潜力。
目前,GR00T N1 2B模型已经正式发布,这也是NVIDIA计划推出的系列可完全定制模型中的第一个。
GR00T N1 模型架构:双系统协同的智慧
GR00T N1的架构设计颇具巧思,其灵感来源于对人类认知系统的模仿,采用了“双系统”协同工作的模式:
视觉-语言模型(系统2):
扩散Transformer(系统1):
这两个系统并非孤立运行,而是在训练后期紧密耦合、协同优化,确保了从“思考”到“行动”的流畅与精准。
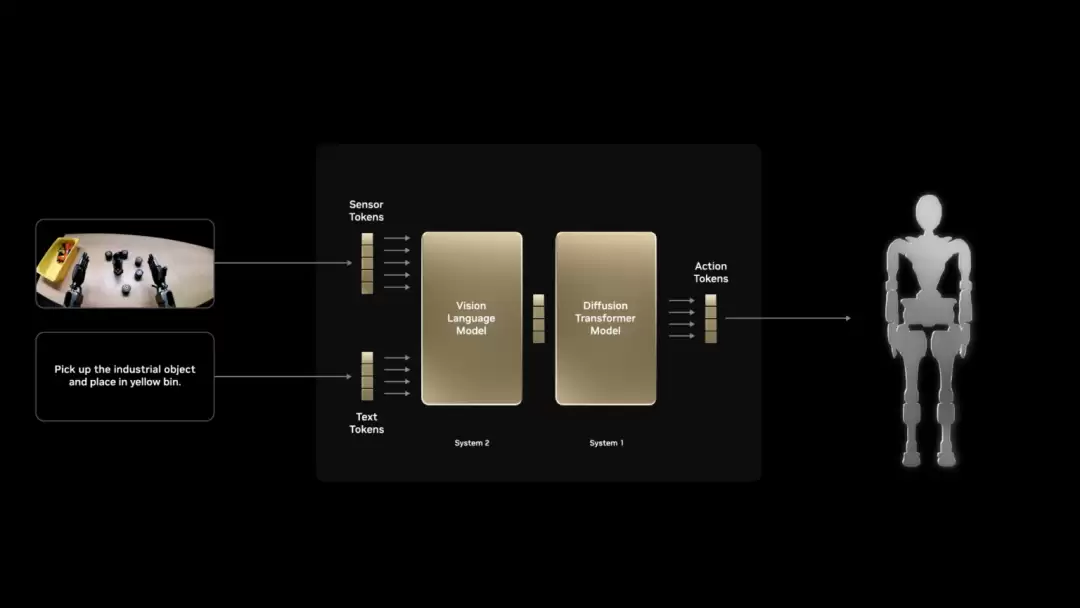
图 2. GR00T N1 模型架构
数据策略:合成与真实的黄金组合
训练一个通用模型,数据策略是成败的关键。GR00T N1采用的金字塔数据策略,巧妙地平衡了数据规模与质量。海量的互联网视频奠定了广泛的视觉语义基础,但缺乏机器人的控制信号;合成数据通过GPU加速仿真,能低成本生成海量带控制信号的数据,但存在“仿真到现实”的差距;而顶部的真实机器人数据,虽然获取成本高、数量有限,却是弥合这一差距的关键。
NVIDIA Isaac GR00T Blueprint将这一策略落到了实处。利用该工具,可以在短短11小时内生成超过75万个合成动作轨迹,这相当于6500小时——也就是连续九个月不眠不休的人类演示数据。实践证明,将这些合成数据与有限的真实数据结合后训练模型,其性能比仅使用真实数据训练提升了40%,这无疑是效率上的巨大飞跃。
如何利用GR00T N1进行开发
对于开发者而言,利用GR00T N1开启自己的机器人项目,可以遵循一个清晰的路径:
数据准备:
数据验证:
后训练(微调):
推理部署:
效果评估:
性能表现:仿真与现实的验证
GR00T N1的性能经过了严格的仿真与真实世界双重基准测试。仿真实验采用了三个不同的基准套件,涵盖了多种机器人实体和操作任务。而真实世界测试则聚焦于使用GR-1人形机器人执行桌面操作任务。
测试结果清晰地展示了其优势。在仿真中,GR00T N1在多项任务上取得了高成功率(如表1所示)。在现实世界的复杂操作任务中,例如需要精准操控和双手协调的作业,它同样表现稳健(如表2、表3所示)。
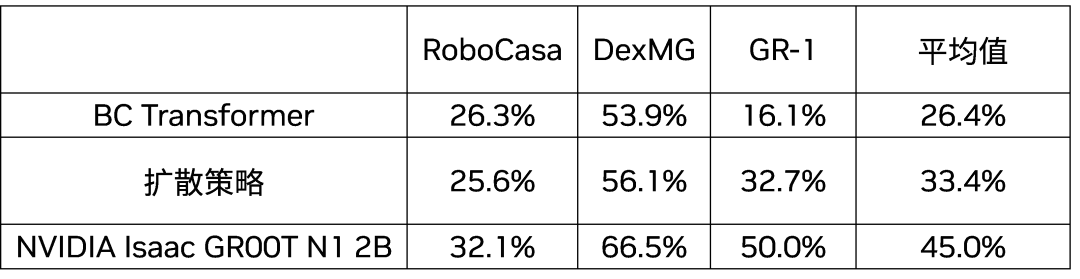
表 1. 每个任务使用 100 次演示的仿真基准测试平均成功率
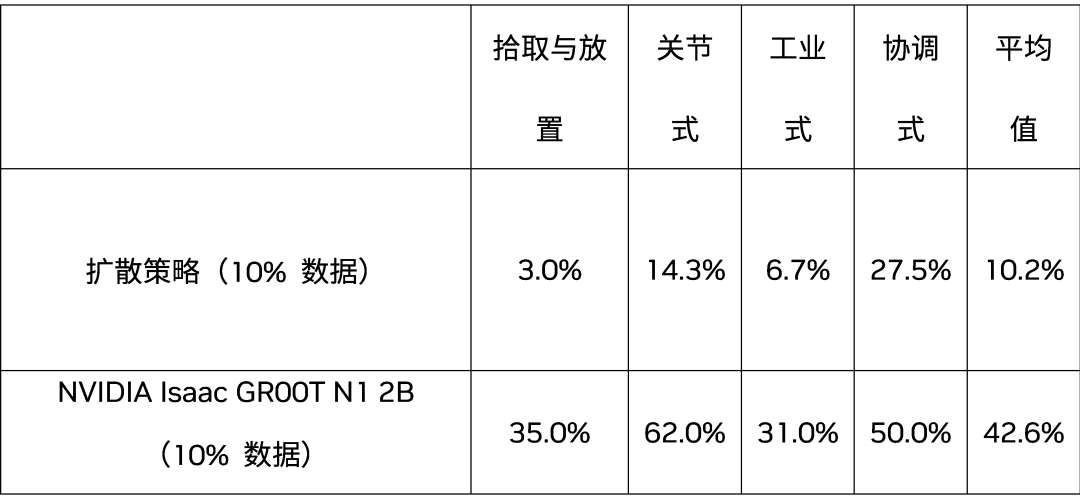
表 2. 使用 GR-1 人形机器人在现实任务上的平均策略成功率
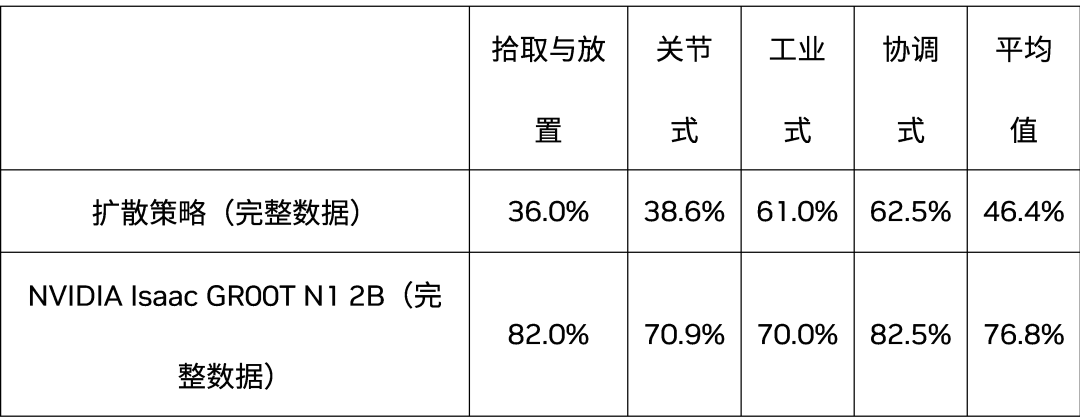
表 3. 使用 GR-1 人形机器人在真实任务上的平均策略成功率
与传统的扩散策略基线相比,Isaac GR00T N1模型生成的运动更加平滑流畅,抓取精度也有显著提升,尤其是在使用较小规模的数据集进行微调时,其数据效率优势更为明显。进一步的测试还表明,GR00T N1不仅学习新任务更快,在执行时对语言指令的遵循也更为精确。这一切都预示着,一个更智能、更易用的机器人开发新时代,正在到来。
-
下饭影视APP下载安装指南
-
和平精英如何做到压枪稳-和平精英怎样才能压枪稳
-
《Off Campus》第二季官宣:这对CP还在,但不再是主角
-
下载浏览器app下载安装选择推荐
-
免费影视剧APP推荐
-
儿子穿新中式现身大会堂 马斯克罕见用中文回应:他正在学习普通话
-
Elysium Above 履云录官网在哪下载 最新官方下载安装地址
-
抖音最火沙雕男生网名(精选100个)
-
阿里发布Qwen3.7-Max大模型,全球第五、国产第一
-
网络热词聊污是什么意思
-
SpaceX狂揽AI人才,马斯克亲自面试且不看简历背景
-
名单曝光!库克、马斯克等将随团到访中国 黄仁勋不在其中
-
短剧《情绪超市》剧情介绍
-
短视频软件推荐
-
免费看片软件下载地址推荐
-
洛克王国世界S2赛季狂欢怪谈介绍
-
免费看电影的软件推荐
-
HBO 奇幻剧《龙之家族》第三季定档 6 月 22 日,最终预告片曝光喉道海战
-
KuCoin基本面分析
-
金铲铲之战s17六暗星卡莎阵容玩法构筑指南
-
2 英伟达发布NVIDIA DSX平台 06-04
-
3 德州仪器毫米波雷达与NVIDIA AI传感器融合实现精准感知 06-05



