PointPillars:基于点云的3D快速目标检测网络
来源:互联网 更新时间:2025-07-18 12:32
PointPillars是一个基于点云的快速目标检测网络,在配置为Intel i7 CPU和1080ti GPU上的预测速度为62Hz,在无人驾驶领域中常常能够使用上它,是一个落地且应用广泛的一个3D快速目标检测网络。
PointPillars:基于点云的快速目标检测网络(训练版)
1、项目总览
①、PointPillars简介
PointPillars是一个基于点云的快速目标检测网络,在配置为Intel i7 CPU和1080ti GPU上的预测速度为62Hz,在无人驾驶领域中常常能够使用上它,是一个落地且应用广泛的一个3D快速目标检测网络。 PointPillars网络的一个非常好的落地应用:Apollo 6.0 lidar中的detector部分
②、项目效果
网络能对点云图进行3D快速目标检测:
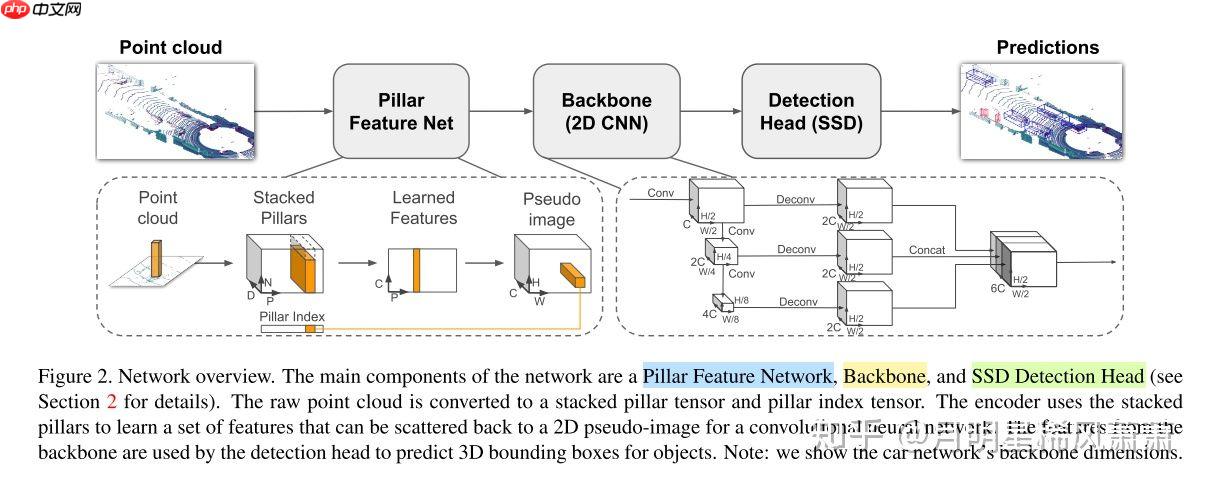
2、网络简介
①、网络结构
②、损失函数

3、网络训练
①、数据集的准备

!rm -rf kitti/!mkdir -p kitti/training/velodyne_reduced!mkdir -p kitti/testing/velodyne_reduced登录后复制In [ ]
!unzip data/data50186/data_object_calib.zip -d kitti/登录后复制In [ ]
!unzip data/data50186/image_training.zip -d kitti/training/!unzip data/data50186/data_object_label_2.zip -d kitti/training/!unzip data/data50186/velodyne_training_1.zip -d kitti/training/!unzip data/data50186/velodyne_training_2.zip -d kitti//training/!unzip data/data50186/velodyne_training_3.zip -d kitti/training/登录后复制In [ ]
!unzip data/data50186/image_testing.zip -d kitti/testing/!unzip data/data50186/velodyne_testing_1.zip -d kitti/testing/!unzip data/data50186/velodyne_testing_2.zip -d kitti/testing/!unzip data/data50186/velodyne_testing_3.zip -d kitti/testing/登录后复制In [ ]
!mv kitti/training/training/* kitti/training/!rm -rf kitti/training/training/!mv kitti/testing/testing/* kitti/testing/!rm -rf kitti/testing/testing/登录后复制In [ ]
!mkdir kitti/training/velodyne!mv kitti/training/velodyne_training_1/* kitti/training/velodyne/!mv kitti/training/velodyne_training_2/* kitti/training/velodyne/!mv kitti/training/velodyne_training_3/* kitti/training/velodyne/!rm -rf kitti/training/velodyne_training_1!rm -rf kitti/training/velodyne_training_2!rm -rf kitti/training/velodyne_training_3!mkdir kitti/testing/velodyne!mv kitti/testing/velodyne_testing_1/* kitti/testing/velodyne!mv kitti/testing/velodyne_testing_2/* kitti/testing/velodyne!mv kitti/testing/velodyne_testing_3/* kitti/testing/velodyne!rm -rf kitti/testing/velodyne_testing_1!rm -rf kitti/testing/velodyne_testing_2!rm -rf kitti/testing/velodyne_testing_3登录后复制
②、安装必要的库
In [ ]!pip install shapely pybind11 protobuf scikit-image numba pillow fire scikit-image登录后复制
③、数据集处理与准备
对KITTI数据集进行处理。
In [1]%cd pointpillars/登录后复制In [ ]
!python create_data.py create_kitti_info_file --data_path=kitti登录后复制In [ ]
!python create_data.py create_reduced_point_cloud --data_path=kitti登录后复制In [ ]
!python create_data.py create_groundtruth_database --data_path=kitti登录后复制
④、训练
In [2]!rm -r ./params/model!python train.py train --cfg_file=./params/configs/pointpillars_kitti_car_xy16.yaml --model_dir=./params/model登录后复制
step=2, steptime=4.51, cls_loss=4.61e+02, cls_loss_rt=3.25e+02, loc_loss=23.5, loc_loss_rt=25.9, rpn_acc=0.253, prec@10=0.00382, rec@10=0.978, prec@30=0.0038, rec@30=0.919, prec@50=0.00402, rec@50=0.776, prec@70=0.00446, rec@70=0.491, prec@80=0.0052, rec@80=0.375, prec@90=0.00599, rec@90=0.232, prec@95=0.00588, rec@95=0.132, loss.loc_elem=[1.65, 1.5, 1.39, 1.61, 1.78, 1.59, 3.41], loss.cls_pos_rt=2.57e+02, loss.cls_neg_rt=68.0, loss.dir_rt=1.71, num_vox=11987, num_pos=87, num_neg=16460, num_anchors=16680, lr=0.0002, image_idx=Tensor(shape=[1], dtype=int64, place=CUDAPlace(0), stop_gradient=True, [2156])step=4, steptime=5.91, cls_loss=3.5e+02, cls_loss_rt=2.16e+02, loc_loss=23.9, loc_loss_rt=23.3, rpn_acc=0.339, prec@10=0.00442, rec@10=0.958, prec@30=0.00439, rec@30=0.872, prec@50=0.00457, rec@50=0.669, prec@70=0.00504, rec@70=0.356, prec@80=0.00547, rec@80=0.241, prec@90=0.00625, rec@90=0.141, prec@95=0.00663, rec@95=0.0843, loss.loc_elem=[1.31, 1.61, 1.22, 1.38, 1.49, 1.43, 3.2], loss.cls_pos_rt=1.67e+02, loss.cls_neg_rt=48.6, loss.dir_rt=1.4, num_vox=12134, num_pos=104, num_neg=28902, num_anchors=29156, lr=0.0002, image_idx=Tensor(shape=[1], dtype=int64, place=CUDAPlace(0), stop_gradient=True, [2865])step=6, steptime=4.38, cls_loss=2.91e+02, cls_loss_rt=1.88e+02, loc_loss=23.2, loc_loss_rt=20.4, rpn_acc=0.416, prec@10=0.00414, rec@10=0.951, prec@30=0.00405, rec@30=0.84, prec@50=0.00437, rec@50=0.602, prec@70=0.00533, rec@70=0.303, prec@80=0.00576, rec@80=0.194, prec@90=0.00664, rec@90=0.109, prec@95=0.00687, rec@95=0.0621, loss.loc_elem=[1.26, 1.02, 1.2, 1.2, 1.27, 1.15, 3.09], loss.cls_pos_rt=1.44e+02, loss.cls_neg_rt=43.6, loss.dir_rt=1.15, num_vox=14429, num_pos=95, num_neg=26713, num_anchors=26951, lr=0.0002, image_idx=Tensor(shape=[1], dtype=int64, place=CUDAPlace(0), stop_gradient=True, [7461])step=8, steptime=4.34, cls_loss=2.41e+02, cls_loss_rt=86.1, loc_loss=21.7, loc_loss_rt=18.3, rpn_acc=0.505, prec@10=0.00402, rec@10=0.951, prec@30=0.00393, rec@30=0.818, prec@50=0.00439, rec@50=0.527, prec@70=0.00527, rec@70=0.242, prec@80=0.00567, rec@80=0.15, prec@90=0.00651, rec@90=0.0817, prec@95=0.00678, rec@95=0.046, loss.loc_elem=[0.927, 1.13, 1.04, 1.11, 1.09, 1.11, 2.73], loss.cls_pos_rt=64.0, loss.cls_neg_rt=22.1, loss.dir_rt=1.61, num_vox=10764, num_pos=96, num_neg=27143, num_anchors=27391, lr=0.0002, image_idx=Tensor(shape=[1], dtype=int64, place=CUDAPlace(0), stop_gradient=True, [6295])step=10, steptime=6.53, cls_loss=2.07e+02, cls_loss_rt=68.9, loc_loss=20.1, loc_loss_rt=11.7, rpn_acc=0.597, prec@10=0.00373, rec@10=0.948, prec@30=0.00372, rec@30=0.785, prec@50=0.00438, rec@50=0.459, prec@70=0.0053, rec@70=0.204, prec@80=0.0056, rec@80=0.123, prec@90=0.00642, rec@90=0.0664, prec@95=0.00672, rec@95=0.0374, loss.loc_elem=[0.542, 0.715, 0.656, 0.708, 0.654, 0.682, 1.91], loss.cls_pos_rt=50.4, loss.cls_neg_rt=18.6, loss.dir_rt=0.901, num_vox=13760, num_pos=73, num_neg=37547, num_anchors=37763, lr=0.0002, image_idx=Tensor(shape=[1], dtype=int64, place=CUDAPlace(0), stop_gradient=True, [4677])step=12, steptime=4.59, cls_loss=1.8e+02, cls_loss_rt=43.2, loc_loss=19.3, loc_loss_rt=16.1, rpn_acc=0.668, prec@10=0.00353, rec@10=0.947, prec@30=0.00356, rec@30=0.731, prec@50=0.00442, rec@50=0.404, prec@70=0.00536, rec@70=0.177, prec@80=0.00562, rec@80=0.105, prec@90=0.00643, rec@90=0.0562, prec@95=0.0067, rec@95=0.0314, loss.loc_elem=[0.94, 1.0, 0.978, 0.927, 0.933, 0.843, 2.44], loss.cls_pos_rt=30.7, loss.cls_neg_rt=12.6, loss.dir_rt=1.17, num_vox=15485, num_pos=104, num_neg=26403, num_anchors=26661, lr=0.0002, image_idx=Tensor(shape=[1], dtype=int64, place=CUDAPlace(0), stop_gradient=True, [724])step=14, steptime=4.47, cls_loss=1.6e+02, cls_loss_rt=32.9, loc_loss=18.6, loc_loss_rt=14.5, rpn_acc=0.71, prec@10=0.00351, rec@10=0.934, prec@30=0.00355, rec@30=0.669, prec@50=0.00444, rec@50=0.354, prec@70=0.00537, rec@70=0.153, prec@80=0.00565, rec@80=0.0913, prec@90=0.00647, rec@90=0.0489, prec@95=0.00678, rec@95=0.0275, loss.loc_elem=[1.03, 0.846, 0.812, 0.898, 0.903, 0.875, 1.89], loss.cls_pos_rt=21.6, loss.cls_neg_rt=11.3, loss.dir_rt=0.877, num_vox=13753, num_pos=93, num_neg=37505, num_anchors=37749, lr=0.0002, image_idx=Tensor(shape=[1], dtype=int64, place=CUDAPlace(0), stop_gradient=True, [906])登录后复制
⑤、写在结尾
因为这个写的比较匆忙,可能还有bug没修复,欢迎大佬们来尝试然后给我们提提意见哈哈,预测版本稍后会写出来(其实已经在代码里了,不过还没有fix)。 我们的项目的GitHub地址:AgentMaker/PAPC
4、Reference
论文 nutonomy/second.pytorch mmlab/mmdetection3d SmallMunich/nutonomy_pointpillars hova88/Lidardet
-
悟空浏览器网页版:免费畅游网络世界的极速入口
-
豆包AI安装需要哪些运行时库 豆包AI系统依赖项完整清单
-
2025迷你世界雨薇免费激活码
-
2025崩坏星穹铁道7月3日兑换码
-
Perplexity AI比Google好吗 与传统搜索引擎对比
-
ChatGPT如何生成产品原型 ChatGPT产品设计辅助功能
-
哔哩哔哩教程哪里找
-
蚂蚁庄园今日最新答案7.10
-
光遇6.19大蜡烛在哪里
-
《怪物乐土》哥布林猎手光暗选择技能加点
-
小米在全球范围推送澎湃OS 2.2 这几款机型现可升级
-
iPhone11promax升级iOS 17.2之后怎么样
-
iPhone15pro怎么拍动态照片?
-
2025原神7月2日兑换码分享
-
如何轻松在iPhone上安装DeepSeek
-
光遇7.8免费魔法是什么
-
剪映人像虚化怎么使用 剪映人像虚化使用方法
-
iPhone15 Pro Max屏幕一直亮着是什么原因
-
Edge浏览器怎么关闭某个进程
-
qq音乐怎么免费听歌?qq音乐免费听歌教程
-
1

- 菜鸡冒险家官方下载
- 益智休闲 | 7.74MB
-
2

- 真实炮兵模拟手游下载
- 冒险游戏 | 93.07MB
-
3

- 快玩消星星下载最新版
- 益智休闲 | 19.7M
-
4

- 火影战记1游戏下载
- 角色扮演 | 46.70M
-
5

- 现代汽车驾驶停车场模拟器手机版下载
- 赛车竞速 | 26.95MB
-
3 AI Overviews是什么 AI概览功能全面解析 07-19
-
5 AI语音一键生成视频内容操作教程,新手也能轻松搞定 07-19
-
7 塞尔达传说王国之泪淤泥缠身任务怎么做-淤泥缠身任务攻略 07-19
-
8 豆包AI怎样辅助前端开发?智能生成响应式网页代码 07-19
-
10 Elser AI Comics的AI生成速度受哪些因素影响?如何优化? 07-19



